

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (1): 90-103.doi: 10.11947/j.AGCS.2025.20230302
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Zhenghua ZHANG( ), Guoliang CHEN()
), Guoliang CHEN()
Received:2023-07-21
Revised:2024-12-05
Online:2025-02-17
Published:2025-02-17
Contact:
Guoliang CHEN
E-mail:zh_zhang@cumt.edu.cn;chgl_cumt@163.com
About author:ZHANG Zhenghua (1993—), male, PhD, postdoctor, majors in LiDAR-based localization and navigation. E-mail: zh_zhang@cumt.edu.cn
Supported by:CLC Number:
Zhenghua ZHANG, Guoliang CHEN. A lightweight rotation-invariant network for LiDAR-based place recognition[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 90-103.

Fig. 1
The illustration of LiDAR-based place recognition process"
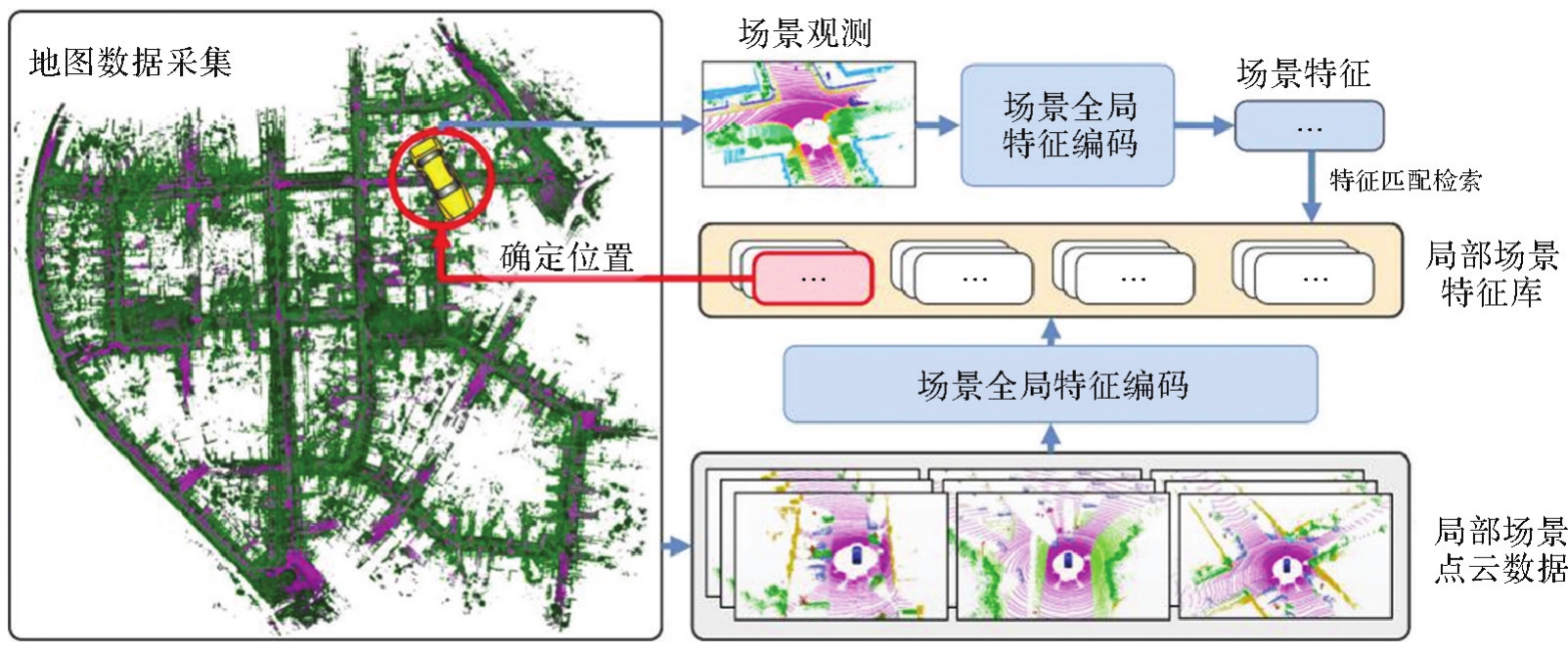
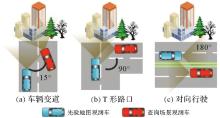
Fig. 2
Illustration of rotations between the query scene and the database-map scene"
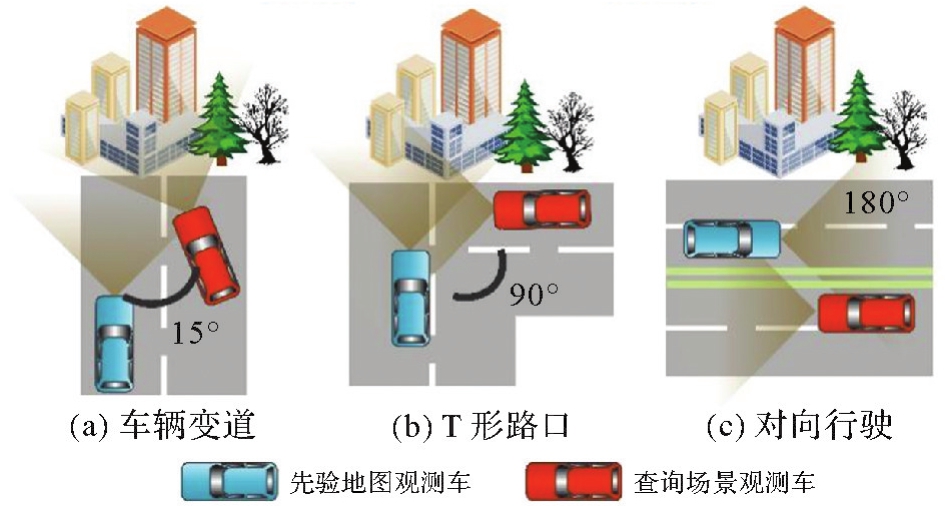

Fig. 3
Architecture of RIP-Net"


Fig. 4
The process of construction rotation-invariant features for local regions"
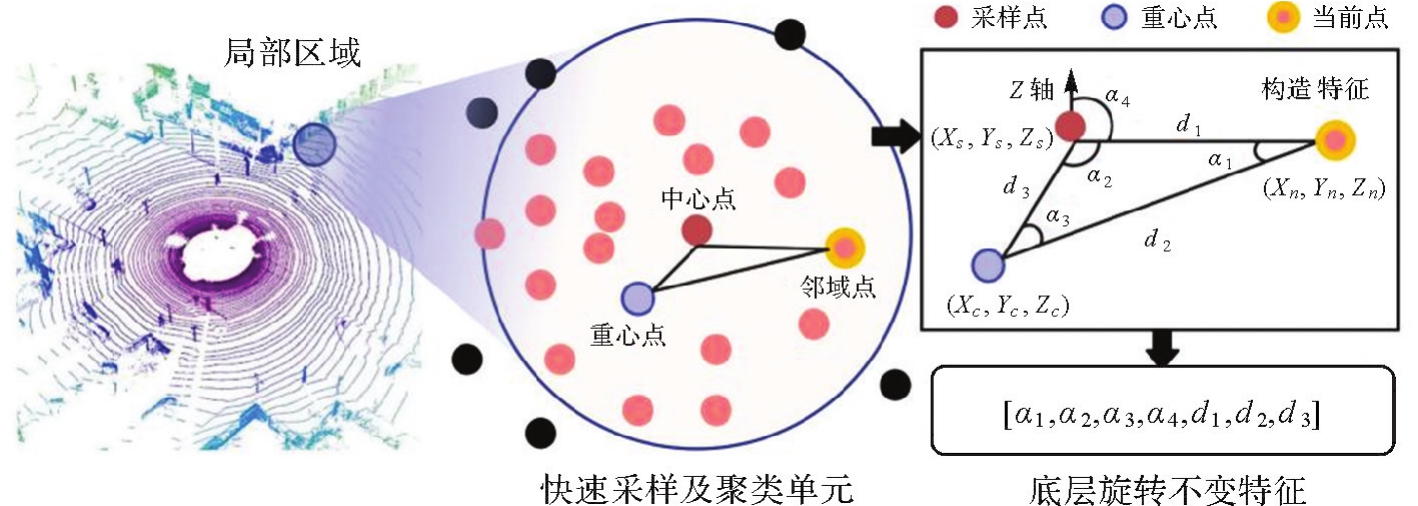
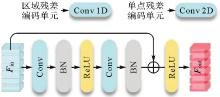
Fig. 5
Structure of the residual encoding module"
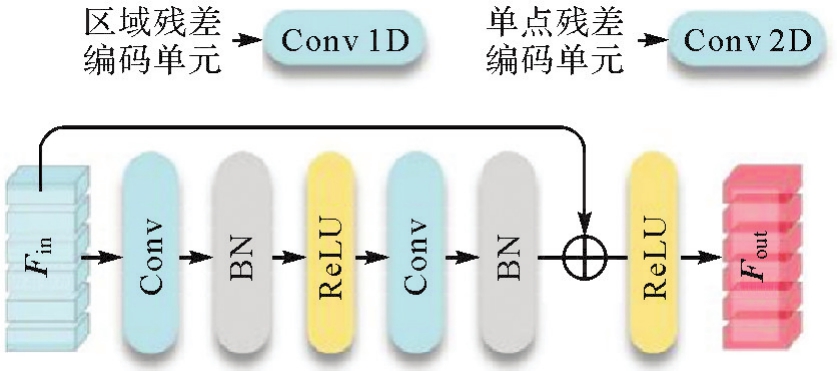
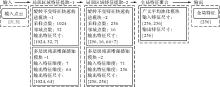
Fig. 6
Implementation details of RIP-Net"

Tab. 1
Datasets utilized in experiments and their details"
| 数据集名称 | 构建时间 | 构建机构 | 场景特征 | 训练集场景数 | 测试集场景数 |
|---|---|---|---|---|---|
| Oxford RobotCar | 2017 | 牛津大学 | 牛津市中心区域场景 | 23 177 | 3030 |
| NUS Inhouse | 2018 | 新加坡国立大学 | 大学校园、居民区与商业区场景 | 0 | 10 813 |
| Mul Ran | 2020 | 韩国科学技术院 | 韩国大田会议中心、科学院及河堤场景 | 26 799 | 43 749 |
| KITTI odometry | 2013 | 德国卡尔斯鲁厄理工学院 | 城市、乡村与公路等场景 | 0 | 18 266 |
Tab. 2
Experimental results on the Oxford dataset"
| 方法 | 参数量 | 运算时间/ms | 准确率/(%) | 最近邻召回率/(%) | 前1%召回率/(%) | F1值 |
|---|---|---|---|---|---|---|
| PointNetVLAD | 19.78×106 | 15 | 11.96 | 15.01 | 31.31 | 0.20 |
| PCAN | 20.42×106 | 55 | 12.82 | 14.81 | 32.81 | 0.21 |
| EPC-Net | 4.70×106 | 26 | 59.97 | 59.78 | 80.93 | 0.74 |
| MinkLoc3D | 1.06×106 | 12 | 85.62 | 74.26 | 90.14 | 0.91 |
| MinkLoc++ | 1.06×106 | 12 | 73.70 | 80.79 | 92.75 | 0.84 |
| PPT-Net | 13.39×106 | 22 | 61.03 | 61.55 | 82.82 | 0.75 |
| SVT-Net | 0.94×106 | 11 | 77.23 | 72.21 | 89.41 | 0.86 |
| LWR-Net | 0.44×106 | 10 | 41.39 | 40.93 | 62.80 | 0.57 |
| SOE-Net | 19.40×106 | 22 | 86.56 | 86.72 | 95.60 | 0.92 |
| RPR-Net | 1.10×106 | 238 | — | 81.00 | 92.20 | — |
| VNI-Net | 2.20×106 | 574 | — | 85.50 | 94.40 | — |
| RIP-Net | 0.30×106 | 9 | 87.50 | 87.57 | 95.83 | 0.93 |
Tab. 3
Experimental results on the generalization performance of the Inhouse dataset"
| 方法 | 大学校园场景 | 居民区场景 | 商业区场景 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 最近邻召回率/(%) | 前1%召回率/(%) | F1值 | 最近邻召回率/(%) | 前1%召回率/(%) | F1值 | 最近邻召回率/(%) | 前1%召回率/(%) | F1值 | |
| PointNetVLAD | 18.16 | 33.76 | 0.20 | 15.17 | 28.42 | 0.20 | 17.39 | 26.12 | 0.27 |
| PCAN | 10.56 | 25.00 | 0.18 | 11.95 | 23.31 | 0.17 | 12.99 | 19.42 | 0.22 |
| EPC-Net | 60.10 | 80.56 | 0.75 | 51.89 | 70.77 | 0.68 | 57.48 | 69.44 | 0.73 |
| MinkLoc3D | 57.17 | 68.27 | 0.81 | 44.88 | 60.54 | 0.77 | 46.13 | 63.79 | 0.82 |
| MinkLoc++ | 65.91 | 81.83 | 0.74 | 65.73 | 75.94 | 0.63 | 57.11 | 76.20 | 0.63 |
| PPT-Net | 42.53 | 69.08 | 0.65 | 54.83 | 68.14 | 0.60 | 40.59 | 61.56 | 0.73 |
| SVT-Net | 53.47 | 69.00 | 0.79 | 52.28 | 68.34 | 0.76 | 67.44 | 78.76 | 0.81 |
| LWR-Net | 41.80 | 64.42 | 0.60 | 41.66 | 62.96 | 0.58 | 56.22 | 68.76 | 0.73 |
| SOE-Net | 77.32 | 90.71 | 0.87 | 76.08 | 89.78 | 0.86 | 76.35 | 81.32 | 0.89 |
| VNI-Net | 85.30 | 95.00 | — | 83.30 | 91.50 | — | 81.40 | 86.80 | — |
| RPR-Net | 83.20 | 94.50 | — | 83.30 | 91.30 | — | 80.40 | 86.40 | — |
| RIP-Net | 85.35 | 95.31 | 0.91 | 83.49 | 92.10 | 0.89 | 77.96 | 84.52 | 0.87 |
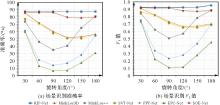
Fig. 7
The influence of different rotation conditions on state-of-the-art LiDAR-based place recognition methods"

Fig. 8
Accuracy changes with noise and point cloud density of RIP-Net and SOE-Net"

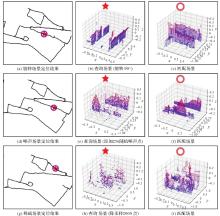
Fig. 9
Place recognition and localization results of RIP-Net under the influence of rotation, noise and sparsity"

Tab. 4
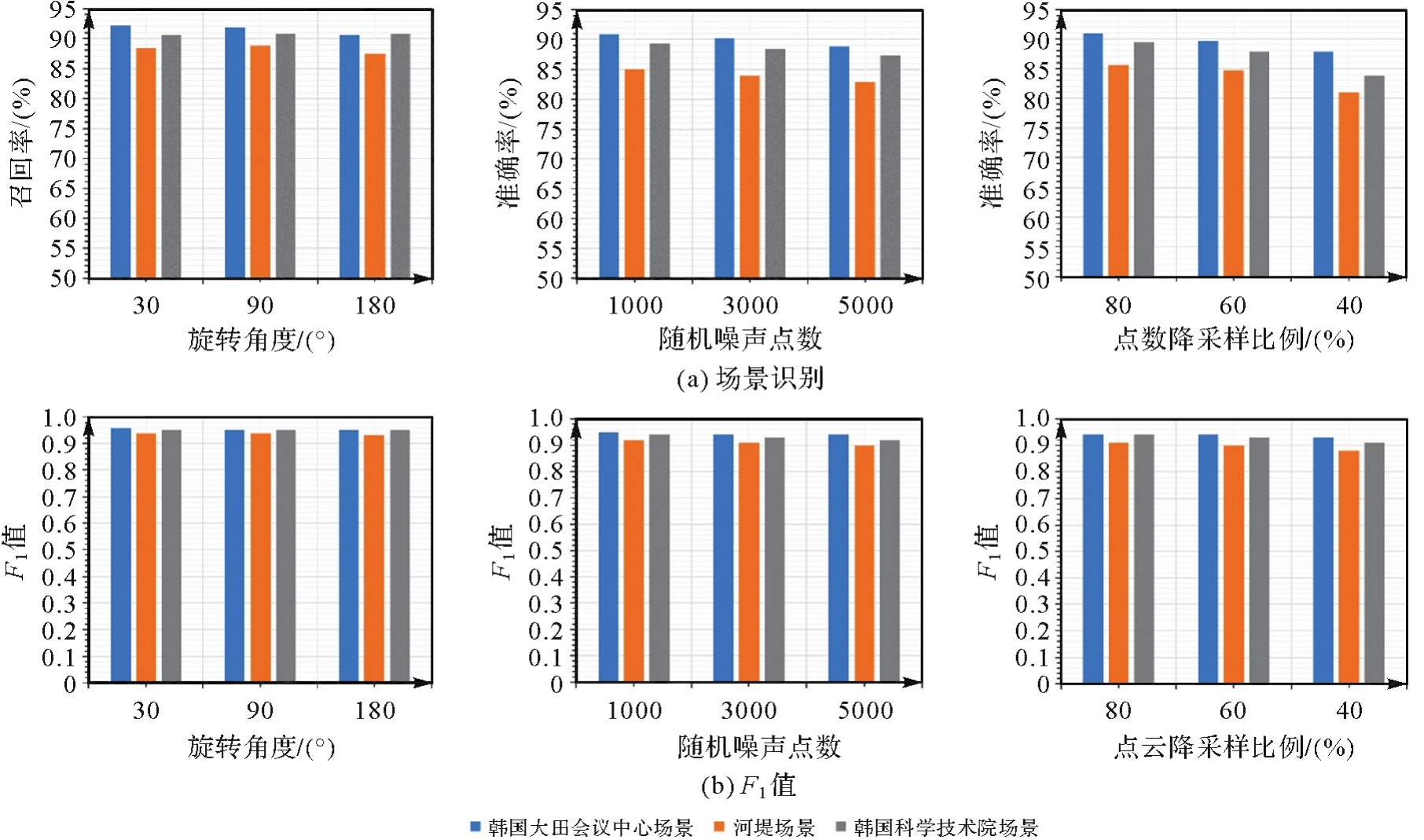
Test on different scenarios in MulRan dataset"
| 方法 | 韩国大田会议中心场景 | 河堤场景 | 韩国科学技术院场景 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 准确率/(%) | 召回率/(%) | F1值 | 准确率/(%) | 召回率/(%) | F1值 | 准确率/(%) | 召回率/(%) | F1值 | |
| MinkLoc3D | 10.37 | 35.81 | 0.17 | 8.95 | 31.72 | 0.14 | 9.12 | 21.56 | 0.14 |
| MinkLoc++ | 12.54 | 33.24 | 0.19 | 9.86 | 31.43 | 0.15 | 10.55 | 38.21 | 0.17 |
| SVT-Net | 11.21 | 40.79 | 0.18 | 8.37 | 34.62 | 0.13 | 12.45 | 39.18 | 0.19 |
| RIP-Net | 92.17 | 99.31 | 0.96 | 88.37 | 99.19 | 0.94 | 90.66 | 98.79 | 0.95 |
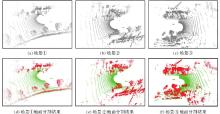
Fig. 10
Ground points segmentation results of cloth simulation filtering algorithm"


Fig. 11
Variation in place recognition precision and F1 score with and without ground point removal"


Fig. 12
Place recognition and localization results of RIP-Net on MulRan dataset under the influence of rotation, noise and sparsity"
Tab. 5
Generalization performance on different sequences of KITTI odometry dataset"
| 场景序列 | 准确率/(%) | 召回率/(%) | F1值 |
|---|---|---|---|
| 00 | 66.02 | 98.50 | 0.79 |
| 02 | 66.13 | 98.48 | 0.79 |
| 05 | 62.54 | 98.17 | 0.77 |
| 06 | 69.83 | 99.63 | 0.82 |
| 07 | 72.49 | 99.77 | 0.84 |
| 07 | 72.49 | 99.77 | 0.84 |
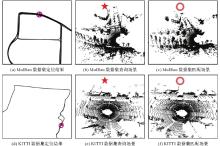
Fig. 13
Place recognition and localization results of RIP-Net in raw point cloud scenarios"
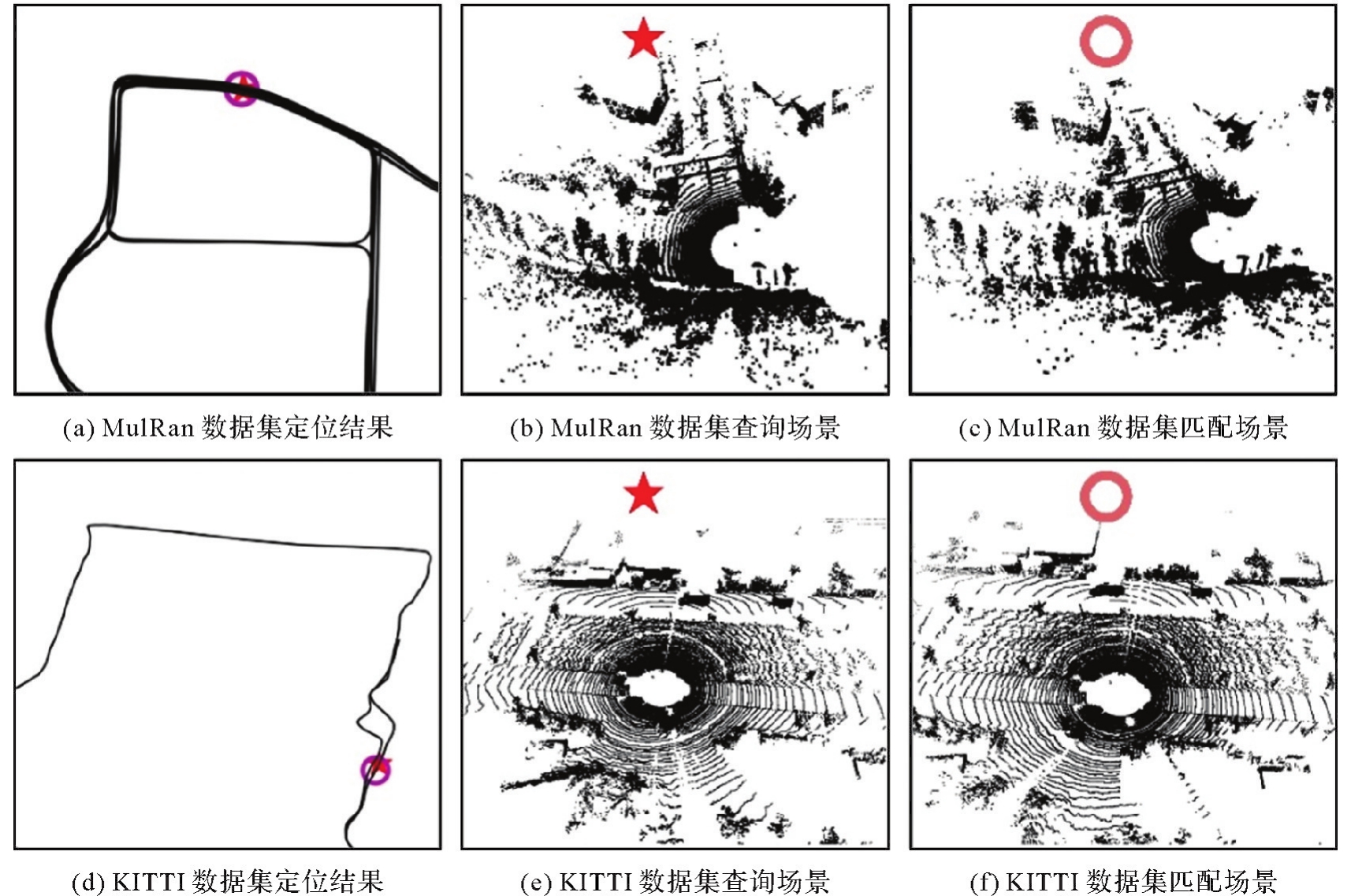
Fig. 14
Influence of replacing rotation-invariant feature with coordinate information"
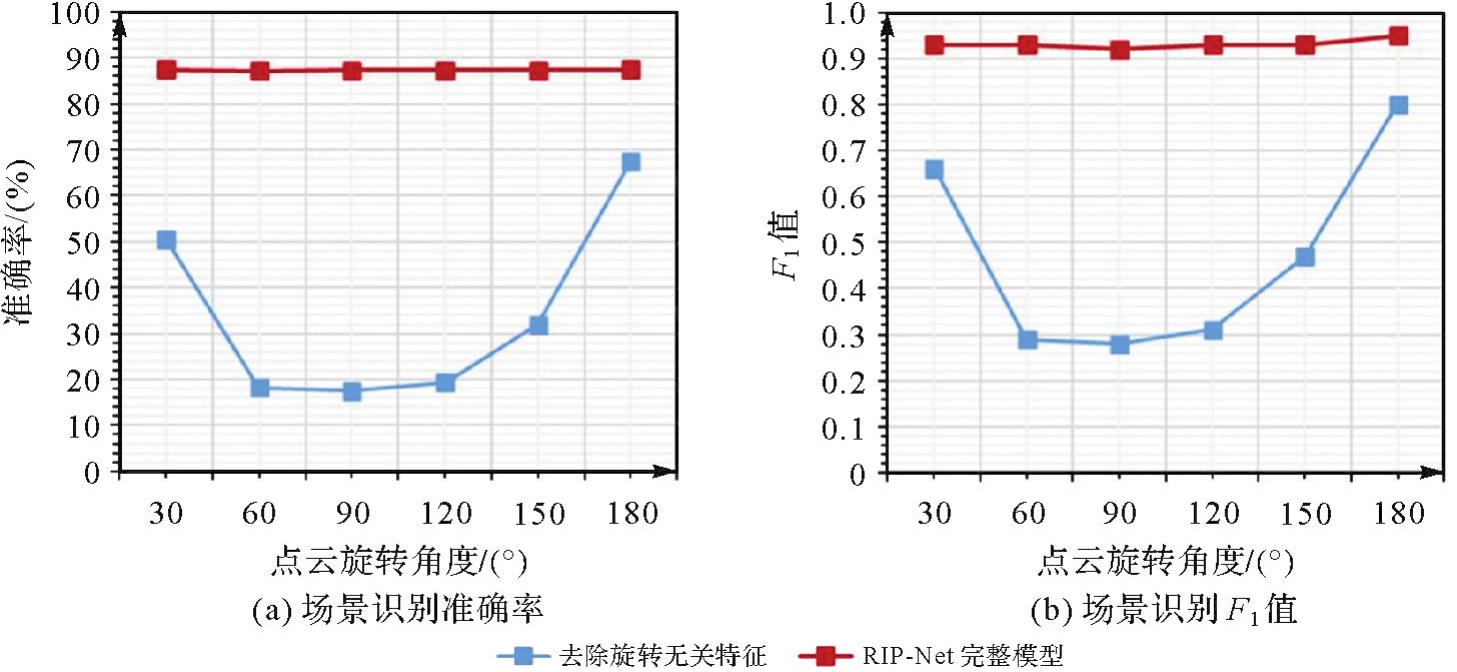
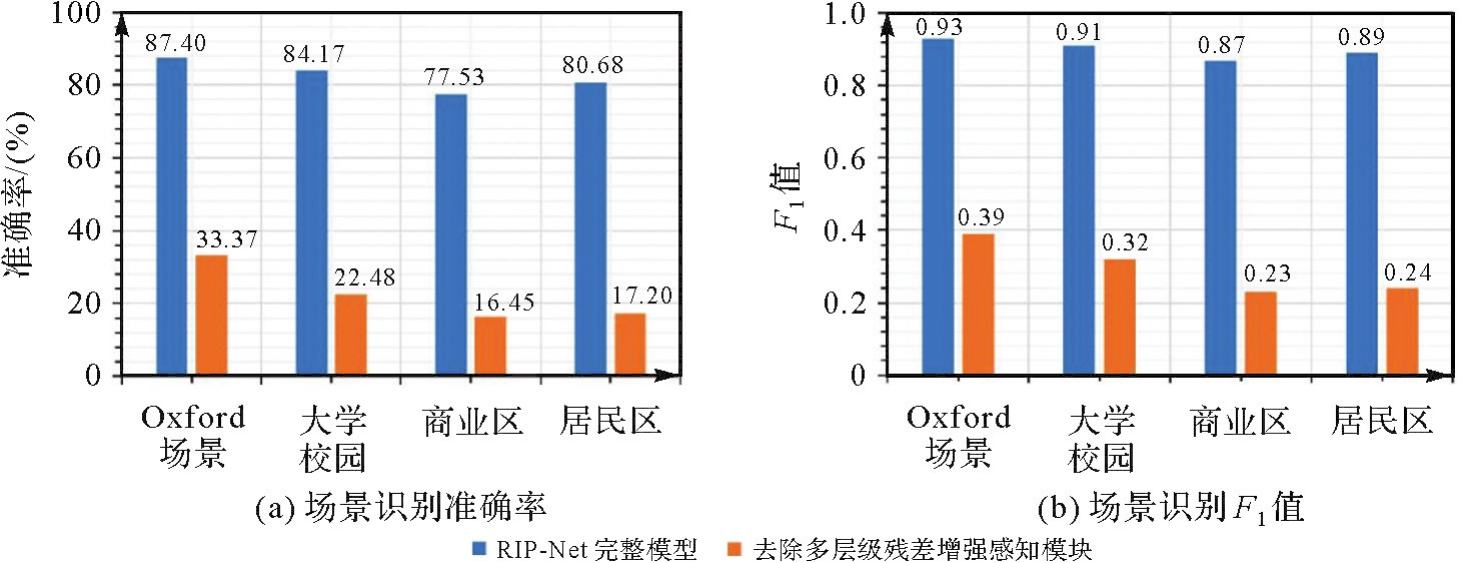
Fig. 15
Influence of replacing the multi-resolution residual-based feature enhancement module"
| [1] | 戴德云. 基于多元信息融合的场景多层级识别方法研究[D]. 合肥: 中国科学技术大学, 2022. |
| DAI Deyun. Research on multi-level scene recognition method based on multi-information fusion[D]. Hefei: University of Science and Technology of China, 2022. | |
| [2] |
杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7): 893-898. DOI:.
doi: 10.11947/J.AGCS.2018.20180149 |
|
YANG Yuanxi. Resilient PNT concept frame[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 893-898. DOI:.
doi: 10.11947/j.AGCS.2018.20180149 |
|
| [3] |
张星, 林静, 李清泉, 等. 结合感知哈希与空间约束的室内连续视觉定位方法[J]. 测绘学报, 2021, 50(12): 1639-1649.DOI:.
doi: 10.11947/J.AGCS.2021.20200286 |
|
ZHANG Xing, LIN Jing, LI Qingquan, et al. Indoor continuous visual positioning method combining perceptual hashing and spatial constraints[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(12): 1639-1649.DOI:.
doi: 10.11947/J.AGCS.2021.20200286 |
|
| [4] | 张恒才, 蔚保国, 秘金钟, 等. 综合PNT场景增强系统研究进展及发展趋势[J]. 武汉大学学报(信息科学版), 2023, 48(4): 491-505. |
| ZHANG Hengcai, YU Baoguo, BEI Jinzhong, et al. A survey of scene-based augmentation systems for conprehensive PNT[J]. Geomatics and Information Science of Wuhan University, 2023, 48(4): 491-505. | |
| [5] | 张正华. 基于深度学习的激光雷达点云实时配准与场景识别算法研究[D]. 徐州: 中国矿业大学, 2022. |
| ZHANG Zhenghua. Study on deep-learning-based real-time registration and place recognition algorithm for LiDAR point cloud[D]. Xuzhou: China University of Mining and Technology, 2022. | |
| [6] | WOHLKINGER W, VINCZE M. Ensemble of shape functions for 3D object classification[C]//Proceedings of 2011 IEEE International Conference on Robotics and Biomimetics. Karon Beach: IEEE, 2011. |
| [7] | HE Li, WANG Xiaolong, ZHANG Hong. M2DP: a novel 3D point cloud descriptor and its application in loop closure detection[C]//Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 231-237. |
| [8] | KIM G, KIM A. Scan context: egocentric spatial descriptor for place recognition within 3D point cloud map[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 4802-4809. |
| [9] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12): 1575-1585.DOI:.
doi: 10.11947/j.AGCS.2019.20190465 |
|
YANG Bisheng, DONG Zhen. Progress and perspective of point cloud intelligence[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(12): 1575-1585.DOI:.
doi: 10.11947/j.AGCS.2019.20190465 |
|
| [10] | UY M A, LEE G H. PointNetVLAD: deep point cloud based retrieval for large-scale place recognition[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018. |
| [11] | CHARLES R Q, HAO Su, MO Kaichun, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017. |
| [12] | ARANDJELOVIC R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016. |
| [13] | ZHANG Wenxiao, XIAO Chunxia. PCAN: 3D attention map learning using contextual information for point cloud based retrieval[C]//Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019. |
| [14] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[EB/OL]. [2023-12-10]. https://doi.org/10.48550/arXiv.1706.03762. |
| [15] | LIU Zhe, ZHOU Shunbo, SUO Chuanzhe, et al. LPD-net: 3D point cloud learning for large-scale place recognition and environment analysis[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019. |
| [16] | HUI L, CHENG M, XIE J, et al. Efficient 3D point cloud feature learning for large-scale place recognition[J]. IEEE Transactions on Image Processing, 2022, 31: 1258-1270. |
| [17] | KOMOROWSKI J. MinkLoc3D: point cloud based large-scale place recognition[C]//Proceedings of 2021 IEEE Winter Conference on Applications of Computer Vision. Waikoloa: IEEE, 2021. |
| [18] | RADENOVIC F, TOLIAS G, CHUM O. Fine-tuning CNN image retrieval with no human annotation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(7): 1655-1668. |
| [19] | XU Tianxing, GUO Yuanchen, LI Zhiqiang, et al. TransLoc3D: point cloud based large-scale place recognition using adaptive receptive fields[J]. Communications in Information and Systems, 2023, 23(1): 57-83. |
| [20] | FAN Z, SONG Z, LIU H, et al. SVT-Net: super light-weight sparse voxel transformer for large scale place recognition[J]. AAAI Conference on Artificial Intelligence. 2022, 36(1), 551-560. |
| [21] | TIAN Gengxuan, ZHAO Junqiao, CAI Yingfeng, et al. VNI-Net: vector neurons-based rotation-invariant descriptor for LiDAR place recognition[EB/OL]. [2023-10-15]. https://arxiv.org/abs/2308.12870v1. |
| [22] | FAN Zhaoxin, SONG Zhenbo, LIU Hongyan, et al. SVT-net: super light-weight sparse voxel transformer for large scale place recognition[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(1): 551-560. |
| [23] | XIA Yan, XU Yusheng, LI Shuang, et al. SOE-net: a self-attention and orientation encoding network for point cloud based place recognition[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021. |
| [24] | MADDERN W, PASCOE G, LINEGAR C, et al. 1 year, 1000 km: the Oxford RobotCar dataset[J]. The International Journal of Robotics Research, 2017, 36(1): 3-15. |
| [25] | KIM G, PARK Y S, CHO Y, et al. MulRan: multimodal range dataset for urban place recognition[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020. |
| [26] | LAZANYI K. Are we ready for self-driving cars-a case of principal-agent theory[C]//Proceedings of 2018 IEEE International Symposium on Applied Computational Intelligence and Informatics. Timisoara: IEEE, 2018. |
| [27] | HUI Le, YANG Hang, CHENG Mingmei, et al. Pyramid point cloud transformer for large-scale place recognition[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision. Montreal: IEEE, 2021. |
| [28] | ZHANG Z, CHEN G, SHU M, et al. LWR-Net: robust and lightweight place recognition network for noisy and low-density point clouds[J]. Sensors (Basel, Switzerland), 2023, 23(21): 8664. |
| [29] | KOMOROWSKI J, WYSOCZANSKA M, TRZCINSKI T. MinkLoc++: LiDAR and monocular image fusion for place recognition[C]//Proceedings of 2021 International Joint Conference on Neural Networks. Shenzhen: IEEE, 2021. |
| [30] | ZHANG W, QI J, WAN P, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing. 2016, 8(6), 501. |
| [1] | Jiayao WANG, Lin CHEN, Shiyuan CHENG, Lijun WANG, Siqi XIONG. Artificial intelligence empowering the digital-intelligent transformation of cartographic science [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 381-389. |
| [2] | Xiaomin LU, Zhiyi ZHANG, Haowen YAN, Yi HE, Xiaoning SU. A recognition method for building group pattern integrating deep graph infomax and multilayer perceptron [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 425-438. |
| [3] | Shunping JI, Jin LIU, Jian GAO, Jianya GONG. An intelligent 3D reconstruction framework via deep learning based multi-view image matching [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1633-1646. |
| [4] | Jixian ZHANG, Haiyan GU, Huan NI, Haitao LI, Yi YANG, Shaopeng DING, Songman SUI. Deep learning methods for remote sensing intelligent change detection: evolution and development [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1347-1370. |
| [5] | Shuai FANG, Jiaen LIU, Jing ZHANG. Spatio-temporal fusion algorithm based on adaptive reference feature incorporation and multi-scale feature aggregation [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1476-1488. |
| [6] | Nina MENG, Fengmei LI, Xiaodong ZHOU. Data and cognition dual-driven building group generalization results and scale consistency assessment [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1318-1331. |
| [7] | Yaqing WANG, Zhonghui WANG. River network automated selection method based on heterogeneous graph convolutional networks [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1332-1345. |
| [8] | Xiaoya AN, Weiru GUO, Pengxin ZHANG, Xinxin LI, Lei SHI. Ship trajectories clustering method considering similarity in geometric position and mobility features [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1107-1121. |
| [9] | Chao WANG, Tianyu CHEN, Tong ZHANG, Tanvir AHMED, Liqiang JI, Tao XIE, Jiajun YANG, Shuai WANG. Multi-sensor optical remote sensing images change detection based on global differential enhancement module and balance penalty loss [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 873-887. |
| [10] | Qingli LUO, Xueyan LI, Guoman HUANG, Honghui CHEN, Minglong XUE, Jian LI. AOSN: alpha optimal structure network for height estimation from a single SAR image in mountain areas [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 888-898. |
| [11] | Wei TU, Xiangyuan CHI, Tianhong ZHAO, Jian YANG, Shiping ZHU, Deli CHEN. Multi-view spatio-temporal graph convolutional networks model for urban drainage networks flow prediction [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 334-344. |
| [12] | Zhili ZHANG, Huiwei JIANG, Xiangyun HU. A minimal-interaction framework for accurate and batch extraction of geospatial objects from remote sensing imagery [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1863-1876. |
| [13] | Yan SHI, Da WANG, Min DENG, Xuexi YANG. Spatio-temporal anomaly detection: connotation transformation and implementation path from data-driven to knowledge-driven modeling [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1493-1504. |
| [14] | Xin YAN, Li SHEN, Junjie PAN, Yanshuai DAI, Jicheng WANG, Xiaoli ZHENG, Zhi-lin LI. Weakly supervised building change detection integrating multi-scale feature fusion and spatial refinement for high resolution remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1586-1597. |
| [15] | Jinwei BU, Kegen YU, Qiulan WANG, Linghui LI, Xinyu LIU, Xiaoqing ZUO, Jun CHANG. Deep learning retrieval method for global ocean significant wave height by integrating spaceborne GNSS-R data and multivariable parameters [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(7): 1321-1335. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||