

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (12): 2206-2218.doi: 10.11947/j.AGCS.2025.20250213
• Geodesy and Navigation • Previous Articles Next Articles
Yupeng GU1( ), Wanke LIU1(), Xiaohong ZHANG1,2, Jie HU1, Shujie HU1, Weihao LEI1, Kai ZHENG3
), Wanke LIU1(), Xiaohong ZHANG1,2, Jie HU1, Shujie HU1, Weihao LEI1, Kai ZHENG3
Received:2025-05-26
Revised:2025-11-12
Online:2026-01-15
Published:2026-01-15
Contact:
Wanke LIU
E-mail:ypgu1017@whu.edu.cn;wkliu@sgg.whu.edu.cn
About author:GU Yupeng (2001—), male, postgraduate, majors in navigation techniques and systems. E-mail: ypgu1017@whu.edu.cn
Supported by:CLC Number:
Yupeng GU, Wanke LIU, Xiaohong ZHANG, Jie HU, Shujie HU, Weihao LEI, Kai ZHENG. Neural network-based GNSS stochastic model generation method by fisheye images[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2206-2218.
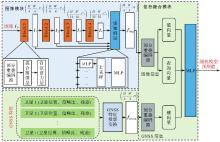
Fig. 1
F-GNet architecture"


Fig. 2
Process of GNSS feature projection"
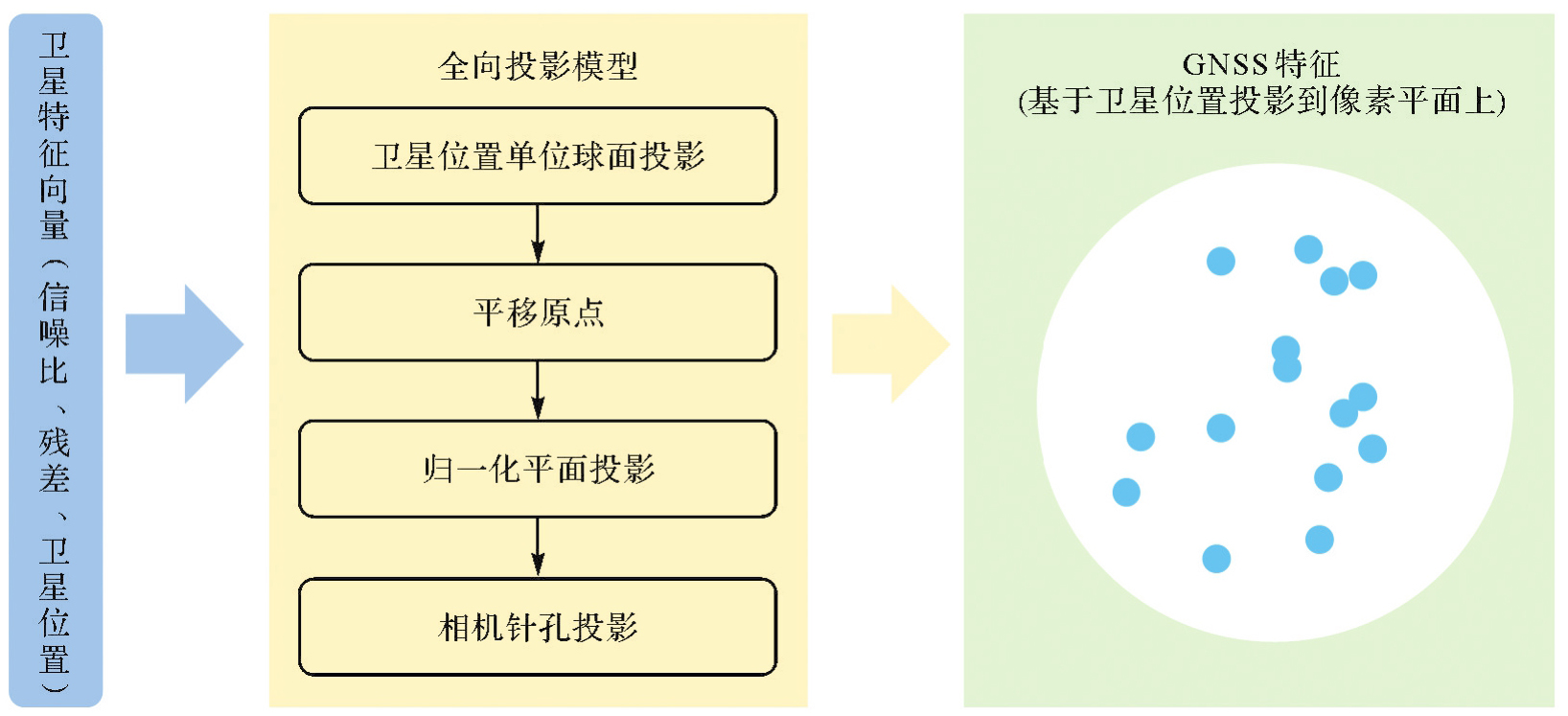
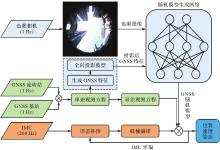
Fig. 3
F-GNet-assisted tightly coupled RTK/IMU navigation system architecture"


Fig. 4
Experimental data acquisition platform"
Tab. 1
Experimental sensor parameters"
| 传感器类型 | 传感器说明 | 传感器参数 |
|---|---|---|
| POMS-7683 | 高精度组合导航设备 | 陀螺零偏不稳定性:0.1°/h |
| 数据频率:200 Hz | ||
| ICM-20602 | 低成本IMU | 陀螺零偏不稳定性:10°/h |
| 数据频率:200 Hz | ||
| Ublox F9P | 低成本GNSS接收机 | 卫星系统:G/R/E/C/J |
| 数据频率:1 Hz | ||
| 鱼眼相机 | 相机 | 图像分辨率:2048×2048 |
| 数据频率:1 Hz |
Fig. 5
Experimental data acquisition trajectory"

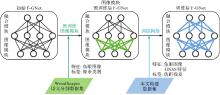
Fig. 6
Process of transfer learning"
Tab. 2
Basic GNSS processing configuration"
| 项目 | 配置 |
|---|---|
| 观测数据 | GPS(L1、L2) |
| BDS-2(B1I、B2I) | |
| BDS-3(B1I) | |
| Galileo(E1、E5) | |
| QZSS(L1、L2) | |
| 星历 | 广播星历 |
| 截止高度角/(°) | 15 |
| 截止信噪比/dBHz | 25 |
Tab. 3
Performance comparison of different network designs"
| 网络设计 | GNSS随机模型RMSE/m |
|---|---|
| GI:图像特征+GNSS特征 | 1.79 |
| CI:交叉注意力层+图像特征 | 3.20 |
| CGI:交叉注意力层+图像特征+GNSS特征 | 1.59 |
Tab. 4
Effect of modality configuration in cross-attention layers on F-GNet performance"
| 网络结构 | GNSS随机模型RMSE/m |
|---|---|
| 模态A | 1.62 |
| 模态B | 1.59 |
| 模态C | 5.52 |

Fig. 7
Sky view image and satellite occlusion view in different typical scenarios"

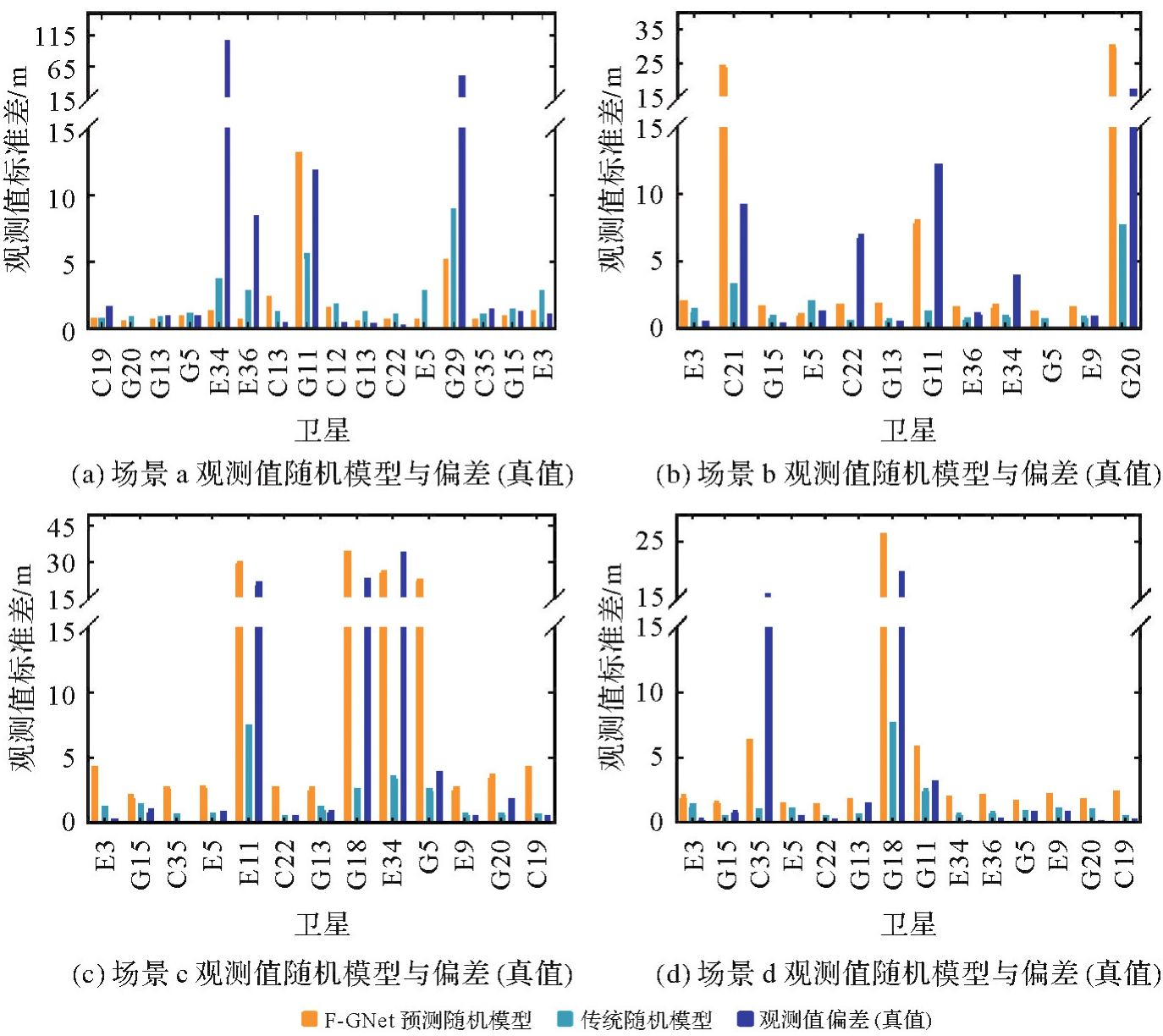
Fig. 8
Prior error based on stochastic model and bias (reference value) of observations in different typical scenarios"
Tab. 5
Error and PDOP of single-point positioning in typical GNSS scenarios"
| 场景 | 定位偏差/m | PDOP | ||||
|---|---|---|---|---|---|---|
| Trad | NLOS-seg | F-GNet | Trad | NLOS-seg | F-GNet | |
| 场景a | 16.935 | N/A | 3.101 | 1.688 | N/A | 1.688 |
| 场景b | 16.082 | 12.425 | 7.227 | 1.792 | 2.471 | 1.792 |
| 场景c | 6.661 | 4.605 | 2.892 | 1.585 | 1.877 | 1.585 |
| 场景d | 6.536 | 3.840 | 2.096 | 1.521 | 1.960 | 1.521 |

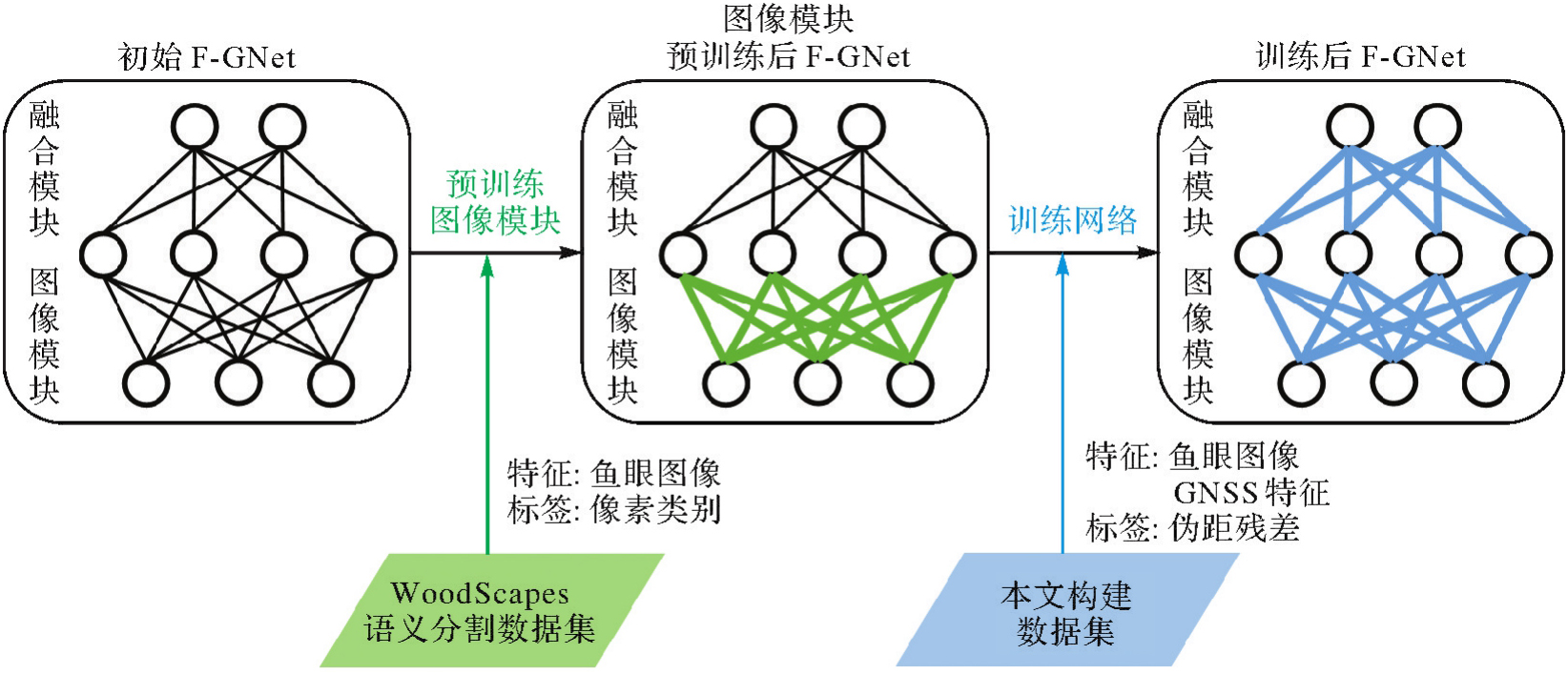
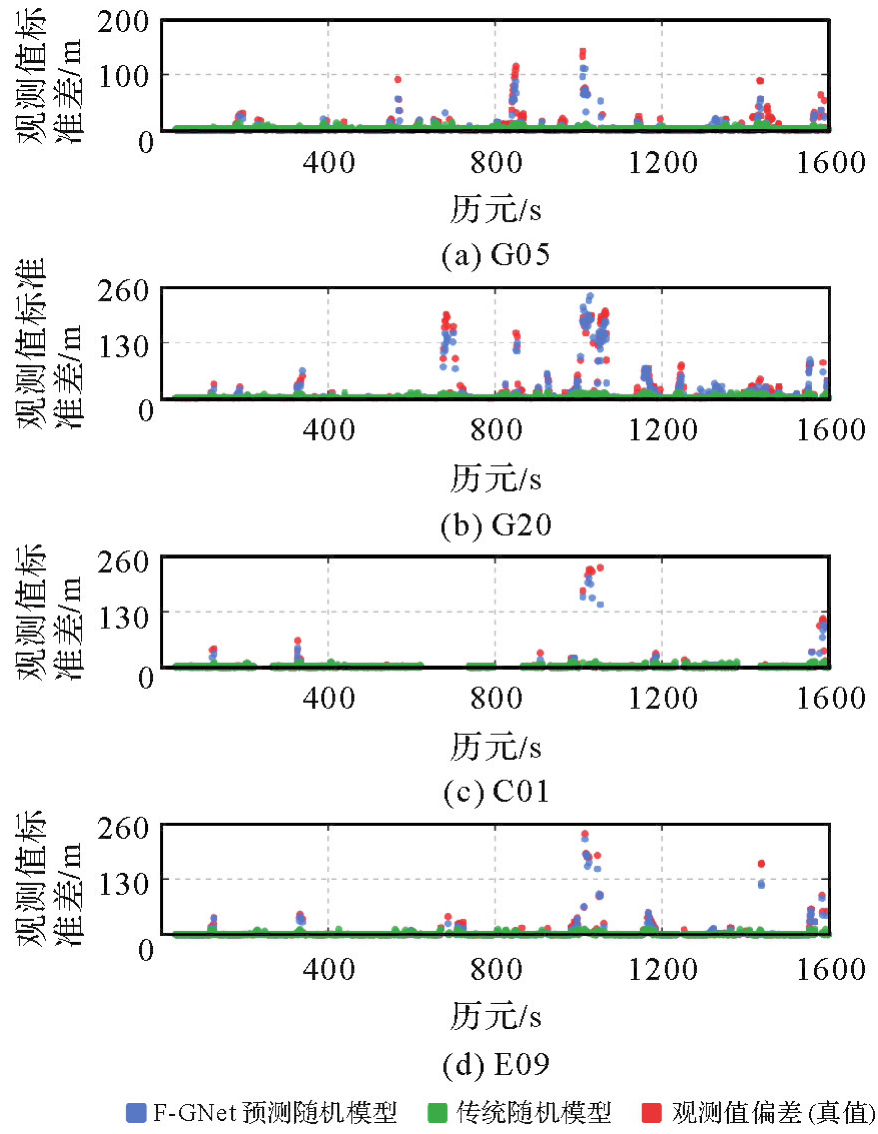
Fig. 9
Time series of prior error based on stochastic model and bias (reference value) of observations"
Tab. 6
GNSS stochastic model predictive accuracy"
| 方法 | GNSS随机模型RMSE/m |
|---|---|
| 传统随机模型 | 10.34 |
| F-GNet | 1.59 |
Tab. 7
F-GNet runtime"
| 最大耗时 | 最小耗时 | 平均耗时 |
|---|---|---|
| 21.1 | 8.8 | 9.2 |
Fig. 10
Double-difference pseudorange residual distribution of GNSS observations"
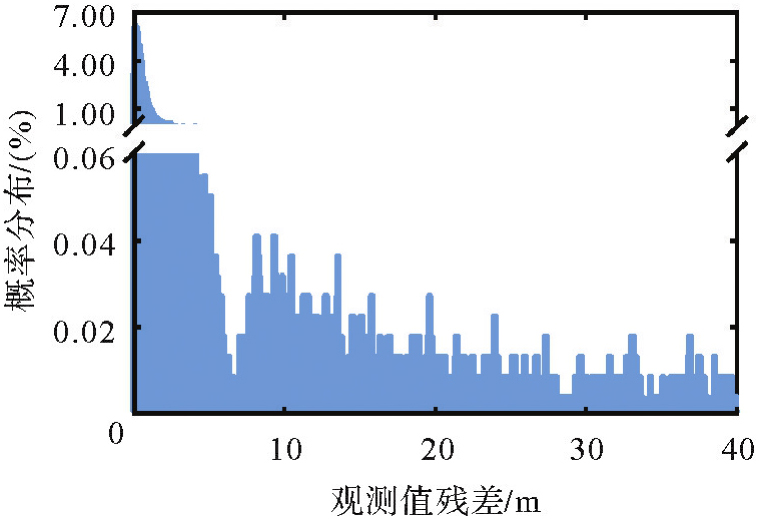

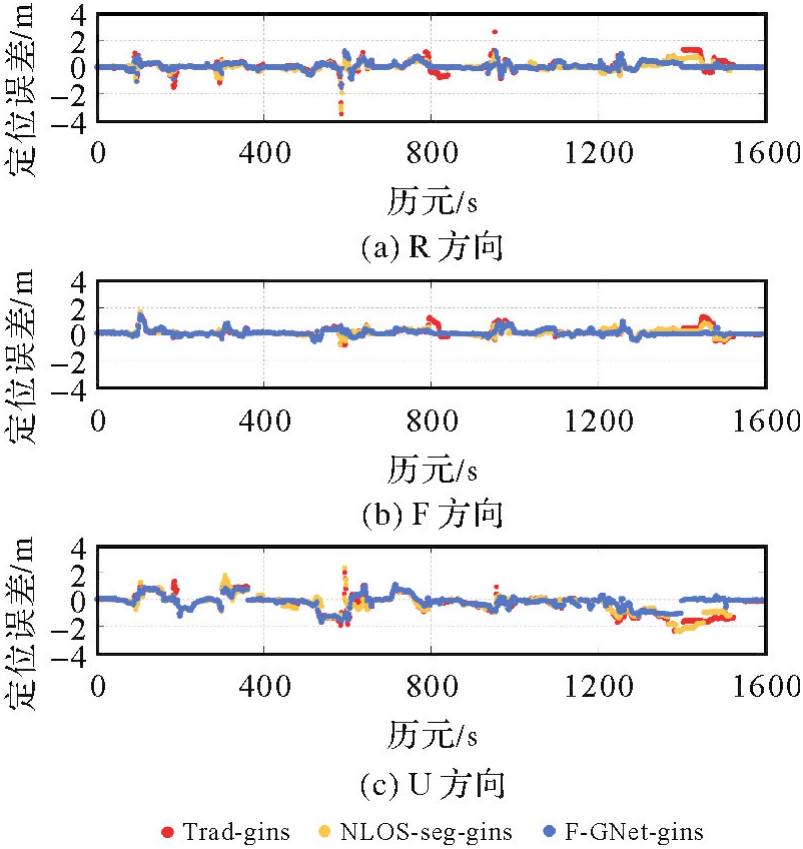
Fig. 11
Positioning error sequence"
Tab. 8
Positioning accuracy of different solutions"
| 解算方案 | 定位RMSE/m | 提升率/(%) | |||
|---|---|---|---|---|---|
| R | F | U | 3D | ||
| Trad-gins | 0.403 | 0.338 | 0.739 | 0.907 | — |
| NLOS-seg-gins | 0.280 | 0.266 | 0.701 | 0.801 | 11.7 |
| F-GNet-gins | 0.246 | 0.248 | 0.499 | 0.609 | 32.9 |
Fig. 12
Cumulative distribution of 3D positioning errors"
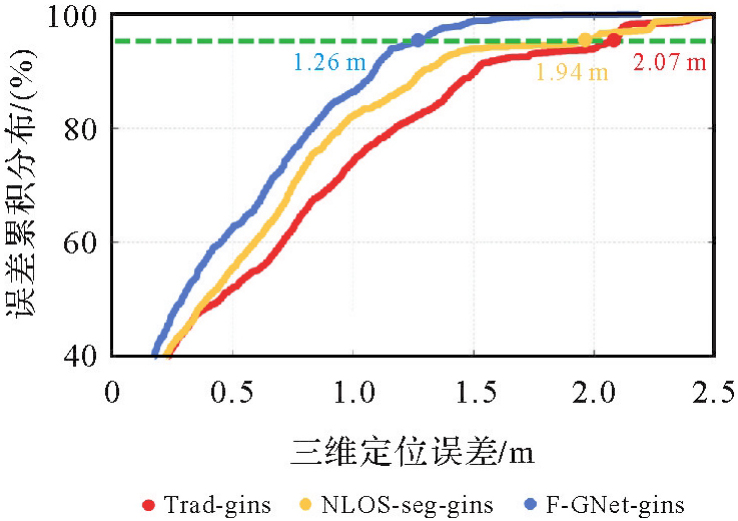
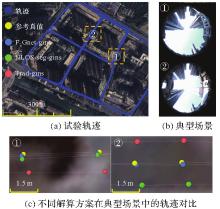
Fig. 13
Comparative trajectory of different solutions"

| [1] |
耿江辉, 常华, 郭将, 等. 面向城市复杂环境的3种多频多系统GNSS单点高精度定位方法及性能分析[J]. 测绘学报, 2020, 49(1): 1-13. DOI: .
doi: 10.11947/j.AGCS.2020.20190106 |
|
GENG Jianghui, CHANG Hua, GUO Jiang, et al. Three multi-frequency and multi-system GNSS high-precision point positioning methods and their performance in complex urban environment[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(1): 1-13. DOI: .
doi: 10.11947/j.AGCS.2020.20190106 |
|
| [2] | 刘慧娟, 党亚民, 王潜心. 多星座实时导航中一种快速次优的选星方法[J]. 测绘科学, 2013, 38(1): 20-22. |
| LIU Huijuan, DANG Yamin, WANG Qianxin. A fast sub-optimal satellite selection method in multi-constellation real-time navigation[J]. Science of Surveying and Mapping, 2013, 38(1): 20-22. | |
| [3] | 黄观文, 雷哲哲, 王进, 等. 亚太区域不同遮挡情形下多系统组合PPP定位效能分析[J]. 大地测量与地球动力学, 2018, 38(6): 562-567. |
| HUANG Guanwen, LEI Zhezhe, WANG Jin, et al. Efficiency analysis of multi-GNSS combined PPP in complex conditions of Asia-Pacific region[J]. Journal of Geodesy and Geodynamics, 2018, 38(6): 562-567. | |
| [4] | ZHENG Fu, LI Qingcheng, WANG Jiale, et al. GNSS NLOS detection method based on stacking ensemble learning and applications in smartphones[J]. GPS Solutions, 2024, 28(3): 129. |
| [5] | SUN Rui, WANG Guanyu, ZHANG Wenyu, et al. A gradient boosting decision tree based GPS signal reception classification algorithm[J]. Applied Soft Computing, 2020, 86: 105942. |
| [6] | LI Xin, XU Qi, LI Xingxing, et al. Improving PPP-RTK-based vehicle navigation in urban environments via multilayer perceptron-based NLOS signal detection[J]. GPS Solutions, 2023, 28(1): 29. |
| [7] | YOZEVITCH R, BEN MOSHE B, WEISSMAN A. A robust GNSS LOS/NLOS signal classifier[J]. Navigation, 2016, 63(4): 429-442. |
| [8] |
朱彬, 杨诚, 刘岩. GNSS多径信号3种非监督学习法分析与比较[J]. 测绘学报, 2021, 50(12): 1762-1771. DOI: .
doi: 10.11947/j.AGCS.2021.20210233 |
|
ZHU Bin, YANG Cheng, LIU Yan. Analysis and comparison of three unsupervised learning clustering methods for GNSS multipath signals[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(12): 1762-1771. DOI: .
doi: 10.11947/j.AGCS.2021.20210233 |
|
| [9] | ZHANG Xiaohong, WANG Xinyu, LIU Wanke, et al. A reliable NLOS error identification method based on LightGBM driven by multiple features of GNSS signals[J]. Satellite Navigation, 2024, 5(1): 31. |
| [10] | ZENG Kungan, LI Zhenni, ZHAO Haoli, et al. A spatiotemporal information-driven cross-attention model with sparse representation for GNSS NLOS signal classification[J]. IEEE Internet of Things Journal, 2024, 11(19): 31892-31908. |
| [11] | WANG Lei, GROVES P D, ZIEBART M K. Smartphone shadow matching for better cross-street GNSS positioning in urban environments[J]. Journal of Navigation, 2015, 68(3): 411-433. |
| [12] | NG H F, ZHANG Guohao, HSU L T. Robust GNSS shadow matching for smartphones in urban canyons[J]. IEEE Sensors Journal, 2021, 21(16): 18307-18317. |
| [13] | XIN Shaoming, GENG Jianghui, ZHANG Guohao, et al. 3D-mapping-aided PPP-RTK aiming at deep urban canyons[J]. Journal of Geodesy, 2022, 96: 78. |
| [14] | NG H F, ZHANG G, HSU L T. Range-based 3D mapping aided GNSS with NLOS correction based on skyplot with building boundaries[C]//Proceedings of 2019 ION Pacific PNT Meeting, Honolulu: ION, 2019: 737-751. |
| [15] | ZHANG Liyuan, NG H F, ZHANG Guohao, et al. Ray-tracing correction for GNSS velocity estimation using Doppler frequency: a feasibility analysis[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 1-10. |
| [16] | WEN Weisong, BAI Xiwei, KAN Y C, et al. Tightly coupled GNSS/INS integration via factor graph and aided by fish-eye camera[J]. IEEE Transactions on Vehicular Technology, 2019, 68(11): 10651-10662. |
| [17] | SUZUKI T, KUBO N. N-LOS GNSS signal detection using fisheye camera for vehicle navigation in urban environments[C]//Proceedings of 2014 International Technical Meeting of the Satellite Division of the Institute of Navigation. Tampa: ION, 2014: 1897-1906. |
| [18] | 袁蕾, 张守建, 王景荣, 等. 城市遮挡环境下天空图辅助的GNSS/INS组合导航[J]. 测绘科学, 2023, 48(9): 1-8. |
| YUAN Lei, ZHANG Shoujian, WANG Jingrong, et al. GNSS/INS integrated navigation aided by sky images in urban occlusion environment[J]. Science of Surveying and Mapping, 2023, 48(9): 1-8. | |
| [19] | 田哲铭, 李旭, 胡悦, 等. 城市峡谷下视觉辅助的GNSS/INS多阶段定位方法[J]. 仪器仪表学报, 2024, 45(4): 217-225. |
| TIAN Zheming, LI Xu, HU Yue, et al. Multi-stage localization method based on camera-aided GNSS/INS integration in urban canyon areas[J]. Chinese Journal of Scientific Instrument, 2024, 45(4): 217-225. | |
| [20] | MARAIS J, KAZIM S A, COCHERIL Y, et al. Multipath and NLOS detection based on the combination of CN0 values and a fisheye camera[C]//Proceedings of 2020 European Navigation Conference. Dresden: IEEE, 2020: 1-13. |
| [21] | HU Runzhi, WEN Weisong, HSU L. Fisheye camera aided GNSS NLOS detection and learning-based pseudorange bias correction for intelligent vehicles in urban canyons[C]//Proceedings of 2023 International Conference on Intelligent Transportation Systems. Bilbao: IEEE, 2023: 6088-6095. |
| [22] | XIE Enze, WANG Wenhai, YU Zhiding, et al. SegFormer: simple and efficient design for semantic segmentation with Transformers[C]//Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021. |
| [23] | SCARAMUZZA D. Omnidirectional camera[M]//IKEUCHI K. Computer vision: a reference guide. Cham: Springer International Publishing, 2021: 900-909. |
| [24] | OTH L, FURGALE P, KNEIP L, et al. Rolling shutter camera calibration[C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland: IEEE, 2013: 1360-1367. |
| [25] | 蔡亲青, 朱锋, 陈曦, 等. 高度角与信噪比混合的GNSS随机模型精化及其对RTK定位性能的影响[J]. 全球定位系统, 2023, 48(1): 24-31. |
| CAI Qinqing, ZHU Feng, CHEN Xi, et al. Refinement of GNSS stochastic model combining elevation angle and SNR and its effect on RTK positioning performance[J]. GNSS World of China, 2023, 48(1): 24-31. | |
| [26] | 张小红, 陶贤露, 王颖喆, 等. 城市场景智能手机GNSS/MEMS融合车载高精度定位[J]. 武汉大学学报(信息科学版), 2022, 47(10): 1740-1749. |
| ZHANG Xiaohong, TAO Xianlu, WANG Yingzhe, et al. MEMS-enhanced smartphone GNSS high-precision positioning for vehicular navigation in urban conditions[J]. Geomatics and Information Science of Wuhan University, 2022, 47(10): 1740-1749. | |
| [27] | RAMACHANDRAN S, SISTU G, MCDONALD J, et al. Woodscape fisheye semantic segmentation for autonomous driving—CVPR 2021 OmniCV Workshop Challenge[EB/OL]. [2025-04-05]. https://arxiv.org/pdf/2107.08246. |
| [28] | KIRILLOV A, MINTUN E, RAVI N, et al. Segment anything[C]//Proceedings of 2023 IEEE/CVF International Conference on Computer Vision. Paris: IEEE, 2023: 3992-4003. |
| [1] | Zhuang SUN, Po LIU, Liang ZHAI, Yu HE, Zutao ZHANG. A self-supervised matching method for polygonal geographic entity based on a three-branch attention network [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 169-180. |
| [2] | Qing CHENG, Boxuan WANG, Hongyan ZHANG. DRformer: a progressive coupled multiscale CNN and condensed attention Transformer method for hyperspectral image super-resolution [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1230-1242. |
| [3] | Yiming ZHAO, Kelin HU, Kelong TU, Yaxian QING, Chao YANG, Kunlun QI, Huayi WU. Multi-label scene classification method based on fusion of SAR and optical remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 911-923. |
| [4] | Xiong PAN, Zixuan ZHAO, Chang PING, Lihong JIN, Lilong LIU. Ionospheric TEC prediction incorporating semi-parametric and rule-learning [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1741-1756. |
| [5] | Yanjun WANG, Xuchao TANG, Cheng WANG, Hengfan CAI. Urban and rural road surface extraction network based on road topological correlation features [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 75-89. |
| [6] | Jichao LÜ, Rui ZHANG, Xu HE, Ruikai HONG, Age SHAMA, Guoxiang LIU. Multi-branch network assessment and dynamic change analysis of wide-area landslide susceptibility [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 104-122. |
| [7] | Jiayi TANG, Xiaochong TONG, Chunping QIU, Yaxian LEI, Yi LEI, Haoshuai SONG. Remote sensing scene retrieval method based on scene graph [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 123-135. |
| [8] | Liangxiong GONG, Xinghua LI, Yuanming CHENG, Xingyou ZHAO, Renping XIE, Honggen WANG. A lightweight remote sensing images change detection network utilizing spatio-temporal difference enhancement and adaptive feature fusion [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 136-153. |
| [9] | Tao XU, Yuanwei YANG, Xianjun GAO, Zhiwei WANG, Yue PAN, Shaohua LI, Lei XU, Yanjun WANG, Bo LIU, Jing YU, Fengmin WU, Haoyu SUN. Integrated graph convolution and multi-scale features for the overhead catenary system point cloud semantic segmentation [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1624-1633. |
| [10] | Liming JIANG, Yi SHAO, Zhiwei ZHOU, Peifeng MA, Teng WANG. A review of intelligent InSAR data processing: recent advancements, challenges and prospects [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1037-1056. |
| [11] | Yanan JIANG, Linfeng ZHENG, Qiang XU, Minggao TANG, Xing ZHU. Step-like displacement prediction of landslides guided by deformation mechanism [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1128-1139. |
| [12] | Bo KONG, Tinghua AI, Min YANG, Hao WU, Huafei YU, Tianyuan XIAO. Identification of loess landform types jointly affected by contour morphological knowledge and the graph neural network [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1154-1164. |
| [13] | Daifeng PENG, Chenchen ZHAI, Dingwei ZHOU, Yongjun ZHANG, Haiyan GUAN, Yufu ZANG. High-resolution optical images change detection based on global information enhancement by pyramid semantic token [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1195-1211. |
| [14] | Shaopeng DING, Xiushan LU, Rufei LIU, Yi YANG, Haiyan GU, Haitao LI. Building change detection method combining object feature guidance and multiple attention mechanism [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1224-1235. |
| [15] | Changqi JI, Zhaojie GUO, Haili SUN, Ruofei ZHONG. Location and rapid detection method of water leakage in subway tunnels based on mobile laser scanning [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1236-1250. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||